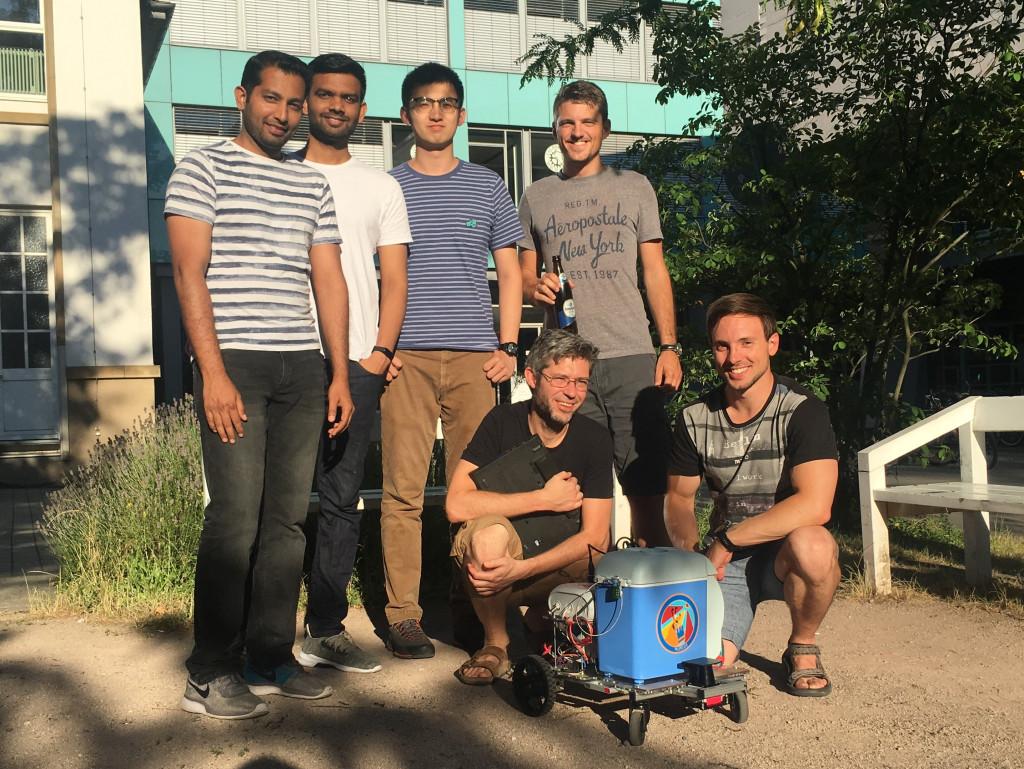
The team from left to right:
TOP = Haril Kumar, Akash Datir, Yuchi Qi, Marius Keil
BOTTOM = Lawrence Iviani, Tibor Mellert
Haril Kumar
Responsibilities: Mechanical System Design, Assembly

“Multiple ideas and thoughts were converted into one product as Pluto. It was a very successful journey working with our global team.”
Akash Datir
Responsibilities: Mechanical System Design, Assembly

“It was great experience working in a team with different technical background. Personally, It was challenging as well as fun working on design and analysis for mechanical system of Pluto.”
Yuchi Qi
Responsibilities: Powertrain, Assembly

“Pluto is a robot, not a dog.”
Marius Keil
Responsibilities: Power Distribution, Battery System, Powertrain

“We proved how powerful agile methods and an open mindset in international environment can be and developed the robot in a few days – what a great experience. Thanks to the Team!”
Lawrence Iviani
Responsibilities: Embedded System Development, Testing

“I have enjoyed the project, setting up the embedded system, develop the electronics and program the beast. It was very exciting getting in touch with ROS and a very different world from my normal background.”
Tibor Mellert
Responsibilities: Project Plan, Sensor, Cooling Systems

“Working at the Pluto project was an exiting experience, combining different cultures and academical backgrounds together to achieve a great result.”