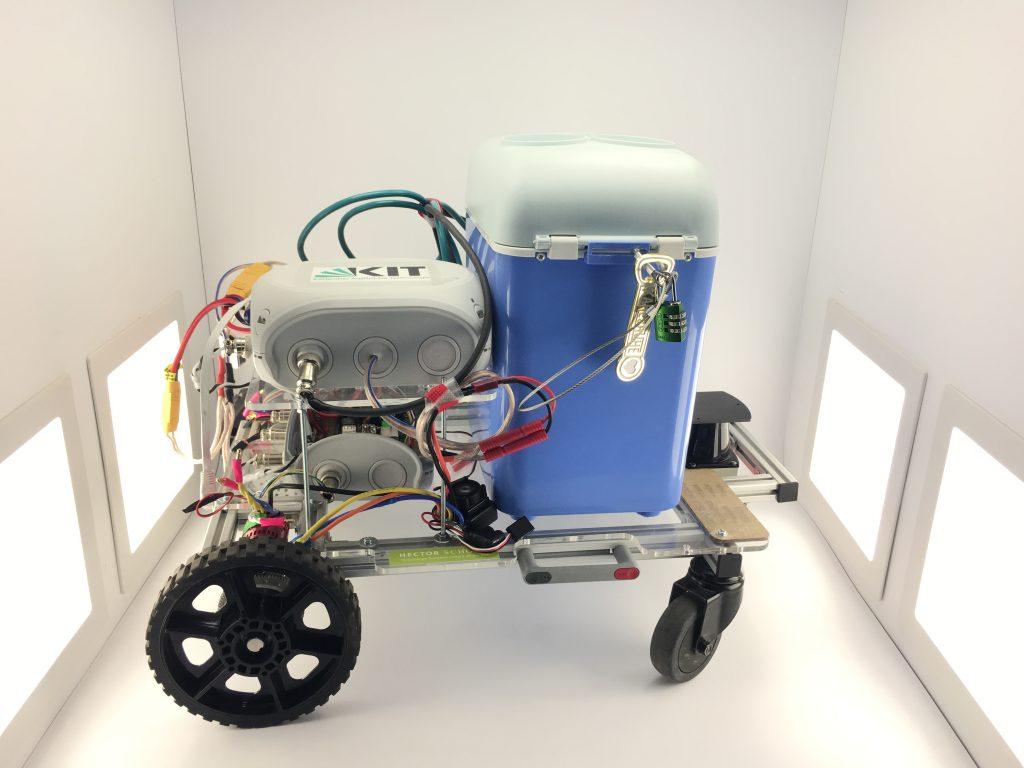
For the design of Pluto, we basically started from the scratch and the main focus while design Pluto was to make it Modular.
So keeping Modular design as our focus point, we have defined our constraints and we came up with the solution so that Pluto can be assemble and disassemble in short time, and also able to replace parts easily.
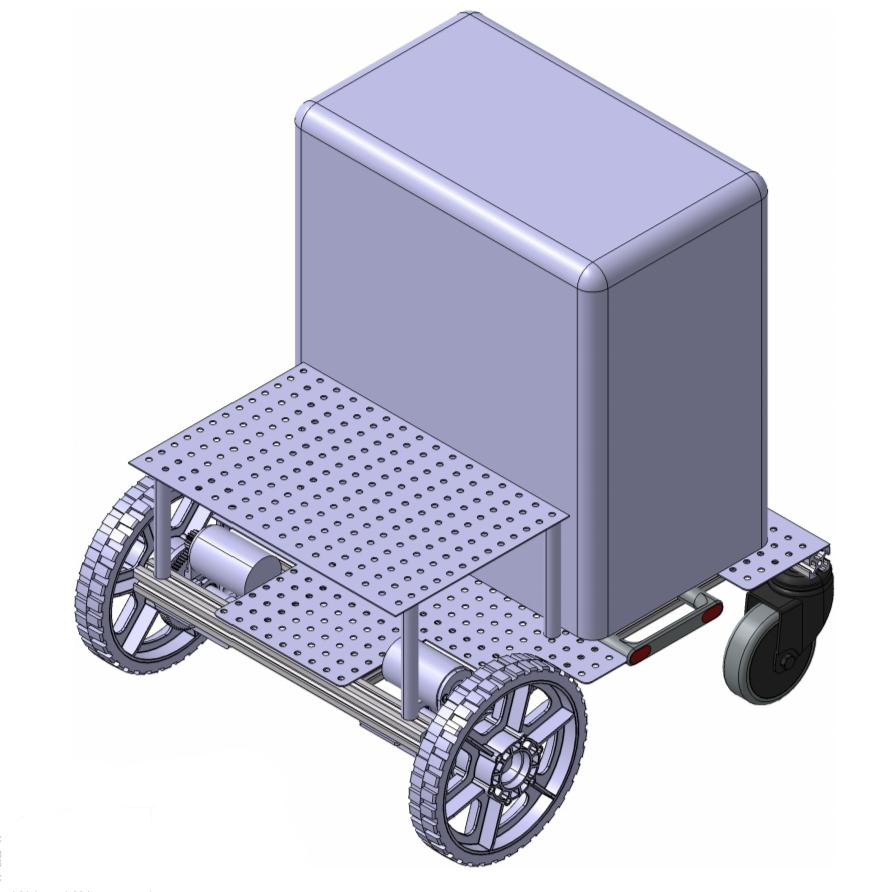
We built whole chassis based on profiles to keep weight as low as possible and have better strength in twisting and bending.
Below you can see basic chassis frame and also assembly in CATIA v5.
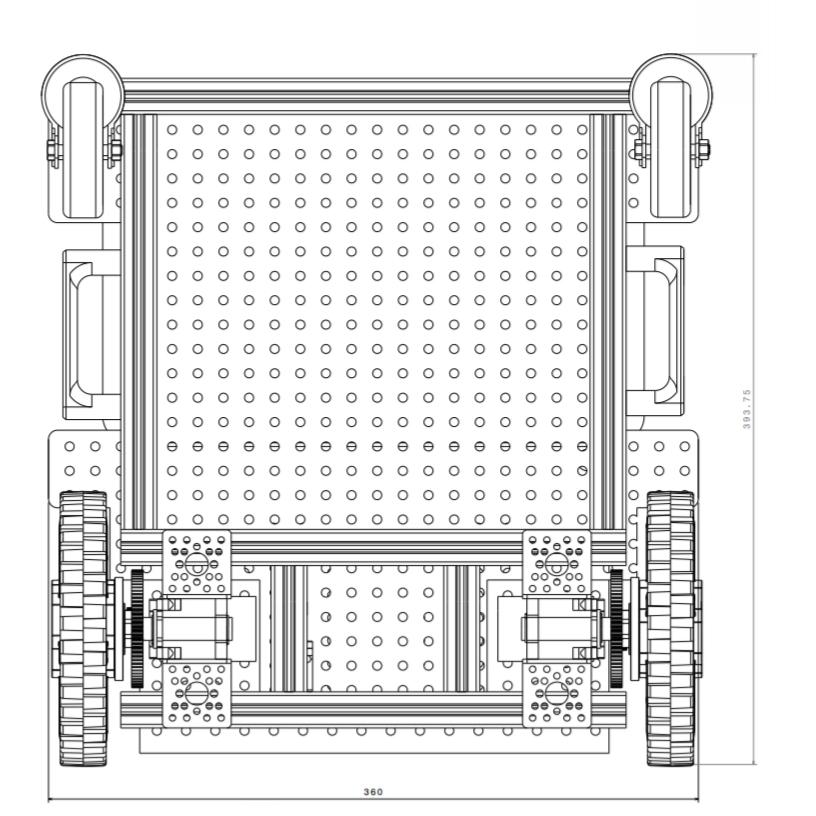
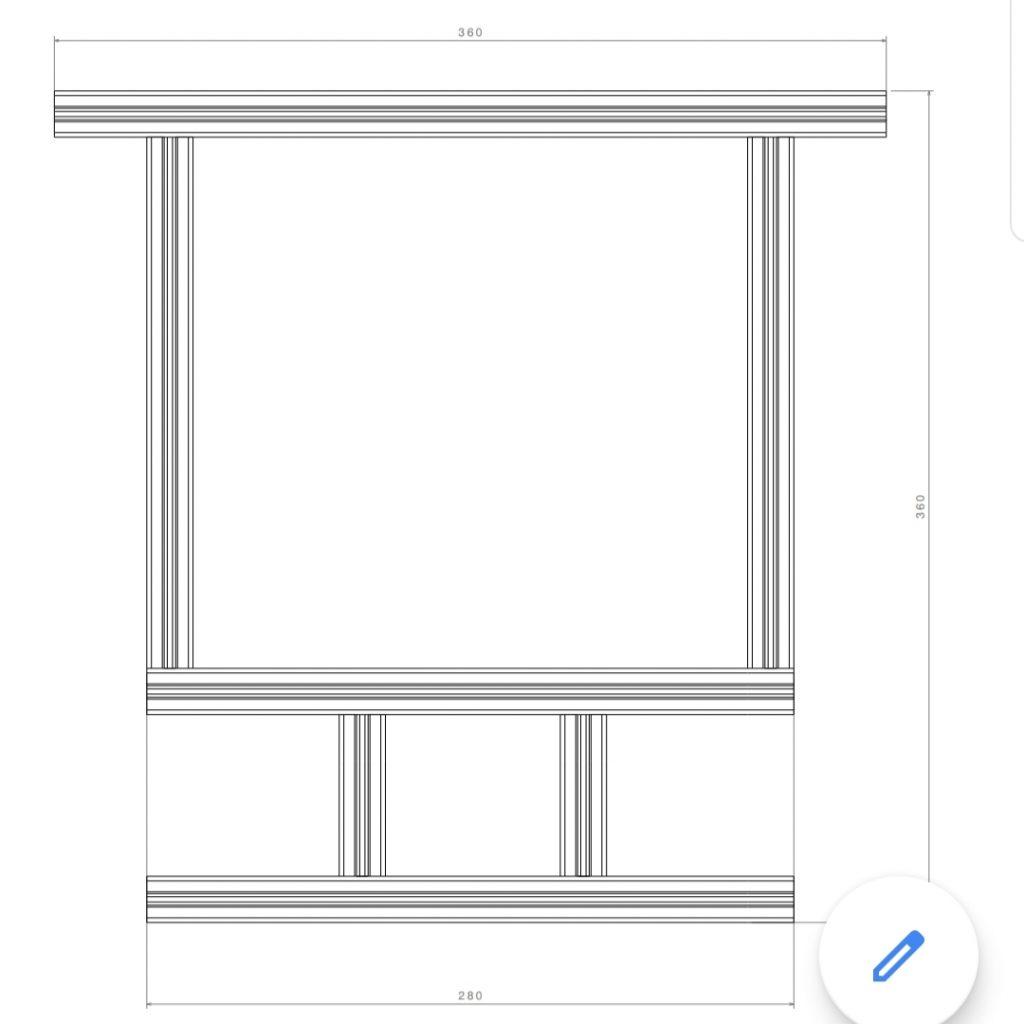
Tools Used: Catia v5
For further information regarding parts used, Bill of Material and step files, you can visit IPEK Sharepoint (only accessable in KIT Network or VPN)