

pluto 2.0 - InTAKE 2018
Main achievements:
– Modular and robust design future generations can build on
– Driving outdoor & autonomous
– 15kg of payload weight capacity
– Obstacle detection & avoidance
– Lock of beer compartment
– Cooling system for beverages
– Can operate day and night
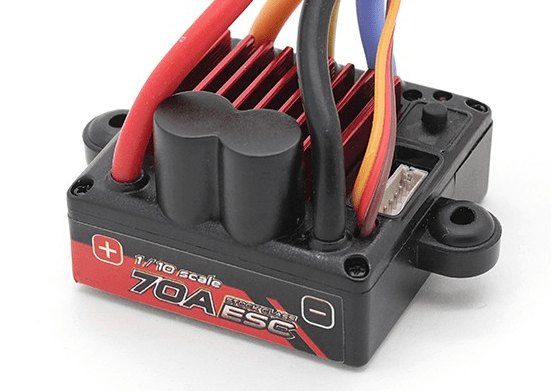
Challenges:
– Behavior of brushless electric-motors
– Breakdown of ESC (electronic speed controller)
Main issues:
– Unequal resistance / running of wheels and gears
– Robot is difficult to steer and control
– Creation of the map fails sometimes (odmetry problems)
– Autonomous driving with anti-collison does not work reliably
| Cookie | Dauer | Beschreibung |
|---|---|---|
| cookielawinfo-checbox-analytics | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics". |
| cookielawinfo-checbox-functional | 11 months | The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional". |
| cookielawinfo-checbox-others | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other. |
| cookielawinfo-checkbox-necessary | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary". |
| cookielawinfo-checkbox-performance | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance". |
| viewed_cookie_policy | 11 months | The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data. |