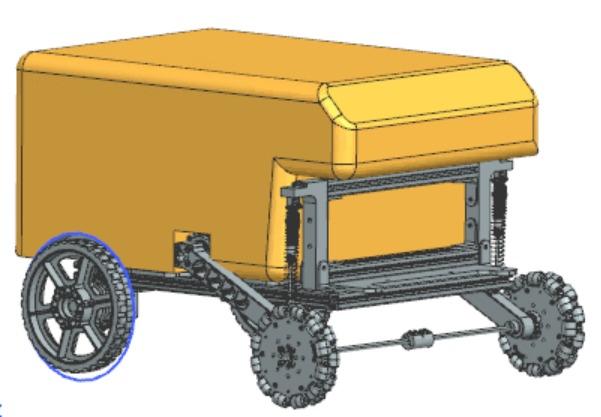
The main objective of the Pluto platform, as a system, is to develop a fully-functional autonomous driving and self localizing and mapping ground robot.
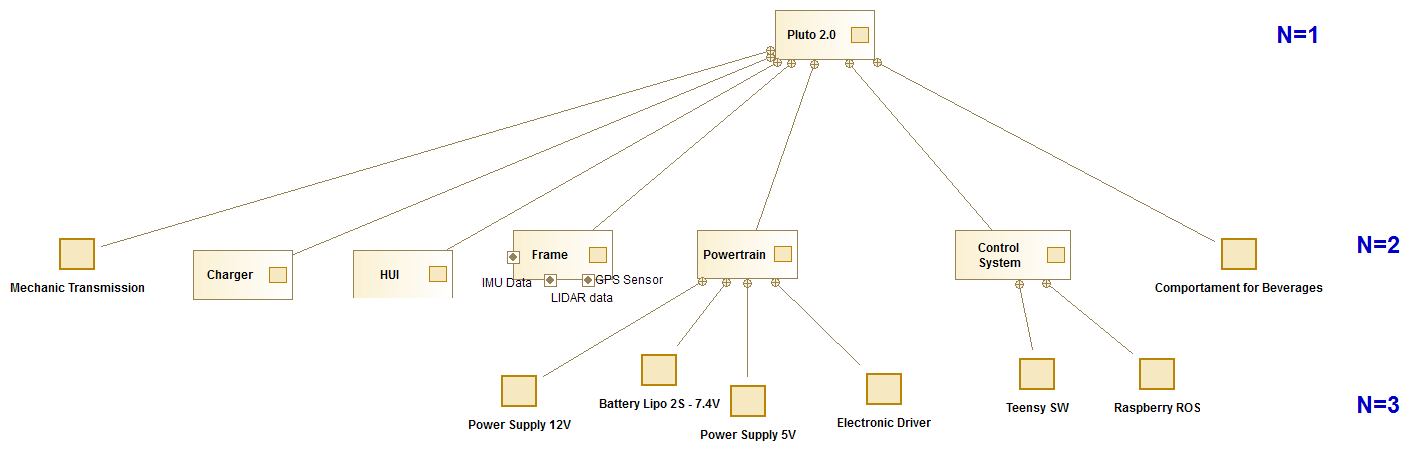
System Hierarchy view:
Technical Information:
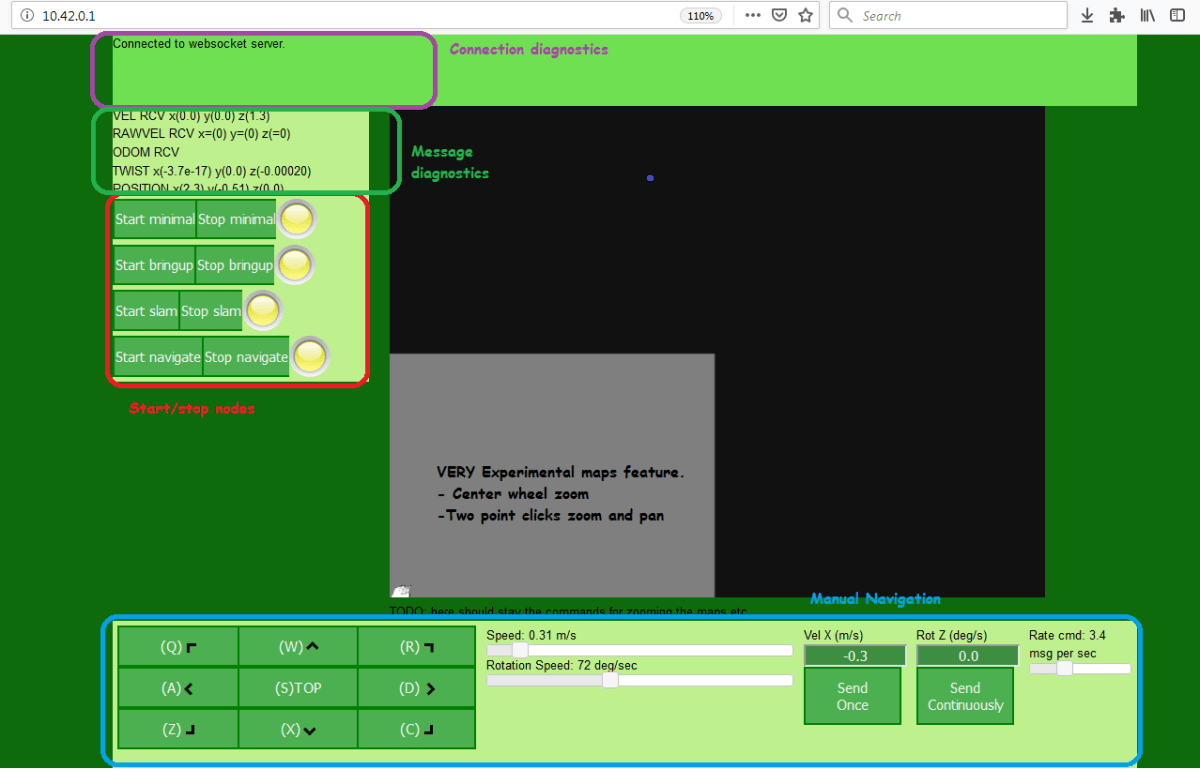
SYSTEM CONTROL
The entire system is controlled via a webapp, that allows different nodes to run and perform the SLAM tasks or the Autonomous Navigation
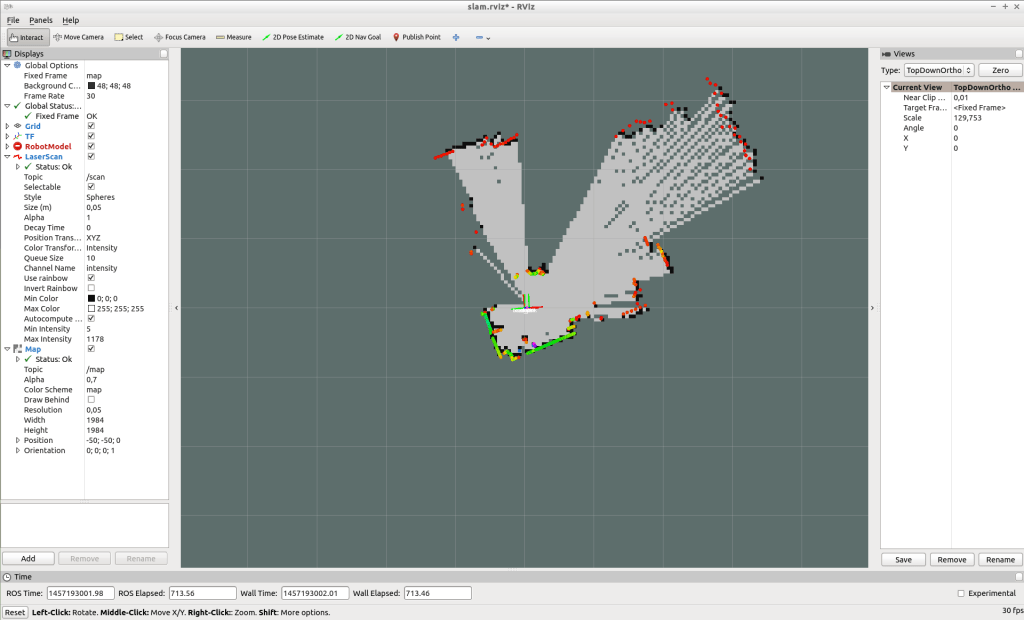
THE NAVIGATION SYSTEM IN DETAIL
The main functionalities of navigation are performed with different ROS nodes that provides navigation and localization functionalities. The embedded system is running on a Raspberry Pi 3 used for first four versions of Plutorobot and Raspberry Pi 4 is for Plutorobot 5.0
By the usage of a Sick Lidar and an IMU the robot is able to perform a proper evaluation robot localization and then perform the navigation.
A sensors fusion, including the RPMs acquisition of the wheels allows the bot to navigate and localize.
Sensor Fusion for robot localization
The power train is composed by two independent brush-less motors controlled by two ESC (electronic speed control)
Brush-less Motor
ESC example (not used in this project)
A separate firmware running on a Teensy 3.2 that receive velocity command and publish achieved velocity process with a PID controller (in a ROS manner)
Wir verwenden Cookies auf unserer Website, um Ihnen die relevanteste Erfahrung zu bieten, indem wir uns an Ihre Vorlieben erinnern und Besuche wiederholen. Durch Klicken auf "Akzeptieren" stimmen Sie der Verwendung ALLER Cookies zu.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Notwendige Cookies sind für die ordnungsgemäße Funktion der Website unbedingt erforderlich. Diese Cookies gewährleisten anonym grundlegende Funktionen und Sicherheitsmerkmale der Website.
Cookie
Dauer
Beschreibung
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Funktionale Cookies helfen dabei, bestimmte Funktionen auszuführen, z. B. den Inhalt der Website auf Social Media-Plattformen zu teilen, Feedbacks zu sammeln und andere Funktionen von Drittanbietern.
Leistungscookies werden verwendet, um die wichtigsten Leistungsindizes der Website zu verstehen und zu analysieren, um den Besuchern eine bessere Benutzererfahrung zu bieten.
Analytische Cookies werden verwendet, um zu verstehen, wie Besucher mit der Website interagieren. Diese Cookies liefern Informationen zu Metriken wie Besucherzahl, Absprungrate, Verkehrsquelle usw.
Werbe-Cookies werden verwendet, um Besuchern relevante Anzeigen und Marketingkampagnen bereitzustellen. Diese Cookies verfolgen Besucher auf verschiedenen Websites und sammeln Informationen, um angepasste Anzeigen bereitzustellen.



. It provides output in combination with gear setup calculated by gear ratio.")


")